Drooid: Decentralized autonomous swarm drones for critical missions
Grant Application
Executive summary
Micro-drones or “bugs” present immense opportunities for carrying out critical search, surveillance and defense operations in tight spaces where larger drones cannot access.
Small bug drones equipped with sensors, imaging capabilities, navigation systems and potentially small payloads offer mobility, maneuverability and access to areas that larger systems may not. This agility could aid disaster response teams, infrastructure inspectors, military and security personnel to better assess situations, threats, damages and plan responses while reducing risks to human operators.
However, significant technological barriers remain in navigation, coordination and functionality of bug-sized drones before this potential can be realized. Drooid seeks to research and develop an innovative Swarm Gradient Bug Algorithm (SGBA) that would enable autonomous swarms of bug drones to efficiently explore unfamiliar environments and return home safely. The SGBA approach would direct outward-bound bugs to optimize coverage area while leveraging inter-drone communication to maximize search efficiency and avoid collisions. Inward journeys would be facilitated by gradient search techniques leading swarms back to their departure beacon. Underpinning technologies involve integrating blockchain for data security and artificial intelligence for continual improvements in navigation, coordination and object recognition capabilities[2]. We are seeking for funding to advance SGBA research and apply it to lifesaving disaster response, safe infrastructure monitoring, and accident investigation.
Problem statement
Search and rescue teams struggle to rapidly locate survivors trapped in rubble after disasters. Infrastructure inspectors risk their lives entering toxic confined spaces. Military operations to deter and selectively neutralize imminent terrorist threats put civilians and personnel in harm’s way. All these critical missions share a desperate need for capability where it otherwise cannot go - the ability to safely enter dangerous spaces inaccessible to human operators, quickly gather critical environmental data, and coordinate an informed, strategic response.
While promises exist of drone technologies addressing these capability gaps, existing drones are too large, loud, resource-intensive and limited in functionality. Micro-drones show potential but get easily lost, crash frequently, and lack the speed, endurance and intelligent coordination to reliably perform critical missions. What is desperately needed is breakthrough technology allowing swarms of micro-bug drones to autonomously navigate, coordinate, and function effectively as a mobile sensory extension of human operators working under extreme time pressure[3].
We cannot afford to send rescue teams in blind, put inspectors personally in harm’s way, or accept avoidable casualties and collateral damage during defense operations. Enhancing mission capability while ensuring operator safety demands investing now in realizing the immense potential of drone swarms through a transformative navigation and coordination algorithm we call SGBA. We owe it to trapped disaster victims, infrastructure safety, and civilian protections to develop and field this solution with utmost urgency. The alternative of inaction promises only repeated, preventable tragedy[1].
Proposed Model: Swarm Robotics
Drooid’s Swarm Gradient Bug Algorithm seeks to achieve a breakthrough in microdrone coordination, navigation and autonomy by synergistically combining the distributed adaptability of bioinspired swarm systems with the global connectivity of blockchain.
Swarm systems are robust, scalable and adaptable to complex environments due to simple local interactions, not unlike natural systems from bacterial colonies to flocks of birds. However, recent research shows complementing local coordination with some global knowledge exchange can aid navigation in unknown terrain and synchronize subgroups within a swarm[5]. Drooid’s innovation is unifying these localized and global information streams to enable resilient, efficient coordination between bug drones.
Each bug drone possesses processors for distributed flight control, navigation, video processing and object detection. Neighboring drones continuously exchange telemetry data to collectively map surroundings and adapt movements to terrain, obstacles and each other. This localized communication enables robust exploration without relying on fragile GPS signals. Yet bugs also tap into global data on the swarm and mission environment streamed from an encrypted blockchain ledger. This provides critical contextual awareness for navigating back to their origin point[6].
Blending localized autonomy with secure global connectivity allows Drooid swarms to dynamically self-organize, navigate and coordinate in the most chaotic disaster sites and contested domains. Our biologically inspired architecture maintains swarm adaptability and resilience, while granting drones collective situational awareness exceeding capabilities of isolated platforms. This breakthrough warrants urgent funding to save lives and advance critical operations[7].
Past Work
Advancements in computing and machine learning have empowered aerial robot to navigate through cluttered environments and adapt to changing wind conditions. Zhou et al introduced a trajectory planner for swarms of microdrones, which can be executed using onboard computing resources exclusively. This planner calculates flight paths based on limited data from the drone's onboard sensors, ensuring collision-free navigation in congested surroundings such as forests[8].
Innovative drone designs and grippers have found practical applications in marine settings. A Viewpoint by Gruber and Wood sheds light on the shift from rigid drones to soft drones for studying marine flora and fauna with minimal disruption. They also outline future directions for the development of deployable devices and drones that facilitate the sampling and examination of organisms at various depths in the seas and oceans[10].
One of the most exciting recent developments is the Subterranean (SubT) challenge presented by the U.S. Defense Advanced Research Projects Agency (DARPA) in 2021. This challenge urged innovators to devise solutions for rapidly mapping, navigating, and conducting searches in underground environments during time-sensitive operations[11].
In the following, I will discuss how blockchain and its underlying principles can be useful for tackling four emergent issues in the swarm robotics field by using the robots as nodes in a network and encapsulating their transactions in blocks.
Security
A major barrier to widespread commercial deployment of robot swarms is vulnerability to security breaches from faulty or compromised members that can severely undermine functionality and goals. Ensuring swarm integrity demands capabilities for mutual authentication and trust between individual platforms. However, existing swarm architectures lack practical, integrated solutions to provide core security services like confidentiality, integrity, entity authentication or data origin confirmation. These gaps partly owe to the complexity of enabling security in decentralized systems comprised of numerous autonomous, interacting agents exhibiting emergent behaviors. Still, amidst booming drone market growth, establishing security foundations for collective autonomy is imperative. Recent research shows distributed ledger technologies like blockchain may offer a crucial pathway. Blockchain's inherent cryptography, consensus rules and append-only ledgers can enable secure, trusted communication channels for swarms to validate identities, preserve data provenance, mitigate risks, and heal from attacks. Purposefully incorporating these decentralized technologies could provide the identity, security and resilience needed for scalable, real-world swarm robot deployments across commercial and public service domains[12].
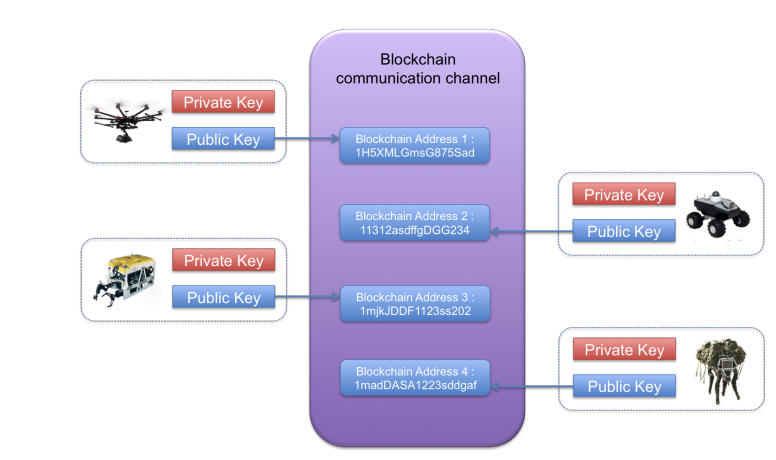
Fig1: Different types of robots share the blockchain communication channel using their public keys as main identifiers.
Blockchain encryption utilizes public key cryptography to enable secure transactions and verify identities between agents on an unsafe, shared network. Each agent possesses a paired public and private key. Public keys act as visible account identifiers on the blockchain ledger, while private keys serve concealed authenticators to validate an agent's identity and authorize operations. The public keys are openly accessible to all agents on the network. But private keys remain completely secret - known only to their owner. This asymmetry allows widely sharing public identity tokens to facilitate transparent interactions between otherwise anonymous parties, while still preserving overall system security through privately held cryptographic proofs tied to each participant. The blockchain's underlying math ensures transactions signed by an agent's unique private key could only have originated from that same entity. This elegantly establishes identity-based accountability even on decentralized, P2P networks[13].
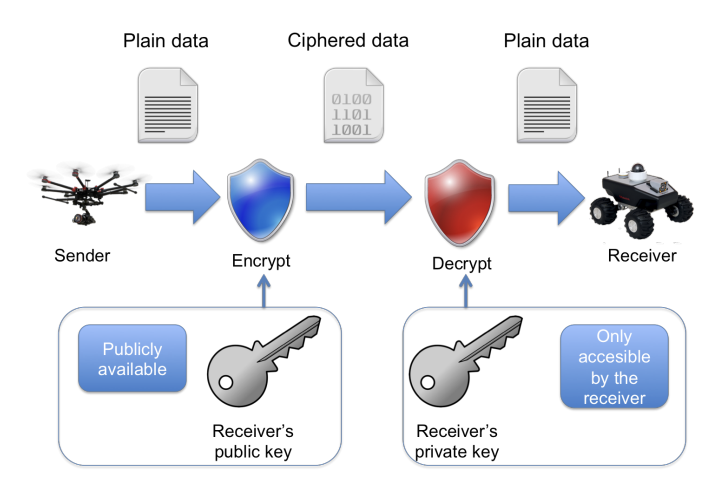
Fig2:Public key cryptography allows robots to be sure that the content of a message can only be read by the owner of the corresponding sending address.
Blockchain's public key cryptography enables secure communication between swarm robots. Each robot possesses a unique public-private key pair. A robot's public key acts as its visible network address to receive messages. Its private key proves identity and decrypts messages.
Robots openly share public keys so any swarm member can address them. But private keys remain secretly held. So only the correct recipient can decode messages using their matching private key.
This elegantly delivers confidential peer-to-peer communication without risking data to third parties, even if they access the same channels. It also verifies identities since only one robot holds the private key that could produce validating signatures tied to a given public address.
In this way, public key cryptography allows establishing trusted connections within an open swarm network comprised of numerous autonomous robots needing to coordinate through shared unsecure mediums[8].
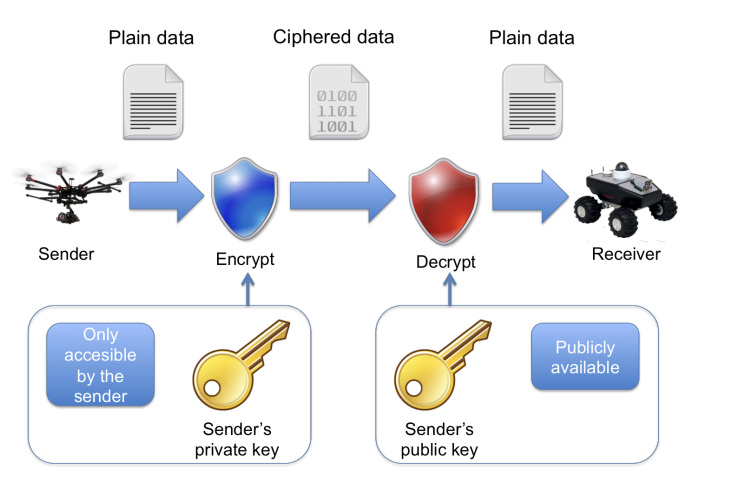
Fig3: Digital signature cryptography provides a way to prove the cownership of a specific address — public key
Blockchain also enables digital signatures - allowing robots to encrypt messages using their private key. Any swarm member can decrypt these signatures using the sender's openly available public key. Though signature contents aren't confidential, they assure authorship - proving the message originated from the specific robot holding that paired private key.
So blockchain provides two critical authentication capabilities:
- Public key cryptography - Ensuring message confidentiality. Content is only readable by one robot possessing the matching private decryption key.
- Digital signatures - Validating identities and data provenance. Signatures verify the sending robot's identity as the signature could only be produced by its unique private key.
These features are immensely valuable for swarm coordination, especially in sensitive applications like disaster response. Swarms must securely share data when coordinating across multiple aid agencies' robotic systems. For example, after an earthquake, autonomous digger robots from Agency A could rely on autonomous drone data from Agency B to identify trapped victims. Blockchain authentication enables trusted information sharing - verifying identities, confirming data integrity, and certifying the drones and diggers are validated to operate together. Agency A's diggers can decrypt visual data from Agency B's drones using their public keys and authenticate the images came from the certified drones by validating their digital signatures. This establishes trusted situational awareness, preserving privacy and security despite chaotic environments or insecure public infrastructure. Blockchain's innate cryptography thereby provides the identity management and data security foundations essential for seamless, resilient multi-agency robotic coordination in the most critical disaster recovery scenarios[10].
Distributed decision making
Robot swarms rely on distributed decision-making to coordinate actions like navigation, task allocation, and collective mapping. But achieving speedy convergence on unanimous decisions becomes challenging as swarms scale. Blockchain presents a potential breakthrough - providing rapid, secure, auditable voting to reach swarm-wide agreements.
For example, when a robot encounters an obstacle requiring re-routing, it proposes possible path options by creating blockchain addresses, openly viewable for each choice. Neighboring robots rapidly vote on the best path by securely transferring tokens to their preferred address. The final tally is immutable, transparent and efficiently communicated across the swarm, driving coordinated navigation.
This blockchain-enabled voting orchestrates fast unanimous decisions even among thousands of decentralized swarm agents. And the transparent ledger allows auditing decision rationales afterward -Unlike previous opaque voting schemes.
Such distributed decision capabilities become especially crucial as swarms grow larger and operate in chaotic, infrastructure-less environments like disaster sites. Converging on shared situational awareness and coordinated responses requires trusted information sharing and collective intelligence between numerous autonomous platforms. Anchoring votes on the shared ledger fosters that unified understanding and action between puzzled swarm agents[11].
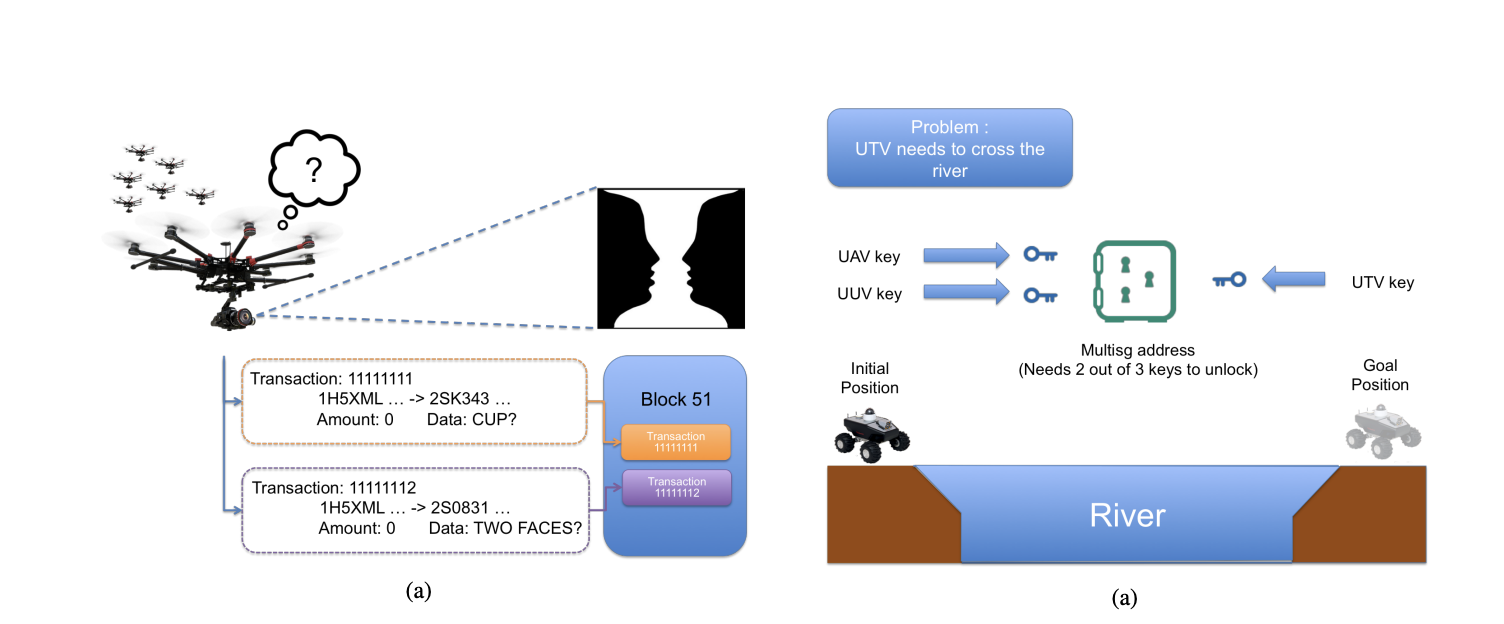
Fig4: (a) One of the swarm members recognizes an object of interest during the mission. In order to reach an agreement the swarm robot executes two transactions, creating two special addresses representing the possible options and registering them in the blockchain
Behavioral Differentiation
While robot swarms can exhibit specialized behaviors like flocking or foraging, real-world missions require coordinating multiple behaviors asynchronously. However, blending behaviors in swarms poses complex controls challenges still lacking robust solutions.
Blockchain introduces a novel potential pathway - configuring hierarchical “pegged sidechains” to segment behaviors. Each sidechain's customized parameters steer subsets of the swarm towards distinct goals.
For example, an inspection swarm may rely on one sidechain using proof-of-work mining to reward drones searching disaster rubble. A separate sidechain with unique permissions could incentivize ground robots to form ad hoc communication chains spanning the site.
Peered sidechains allow hybrid behaviors in a secure, organized framework - no longer confining swarms to narrow functions. Drones assessing a damaged factory could scout independently while also linking power measurements from embedded sensors via an intermittent blockchain ledger specifically designed for resilient data collection.
This blockchain-based behavior differentiation unlocks new realms of coordinated multiplicity previously infeasible for robot swarms operating in uncontrolled environments[9].
The Bug Algorithm
In this section, we introduce the bug algorithm, the primary focus is to introduce a streamlined autonomous navigation solution tailored for a swarm of small flying drones. This solution enables the drones to explore unfamiliar and unstructured environments and subsequently return to their point of origin. The term "exploration" in this context involves covering as much of the unknown environment as possible to gather pertinent information. The proposed navigation solution was successfully implemented within a swarm of small flying drones and demonstrated in a significant real-world indoor environment without external infrastructure for precise positioning. Additionally, the solution facilitated a proof-of-concept search-and-rescue exploration mission within the same environment, where the swarm collected images to locate "victims."[4]
The central innovation introduced is the Swarm Gradient Bug Algorithm (SGBA). Unlike traditional bug algorithms that originated as maze-solving algorithms, the SGBA has been explicitly designed to enable a swarm of tiny drones to explore real-world GPS-denied environments. Departing significantly from existing bug algorithms, the SGBA works by having each drone in the swarm follow a distinct preferred direction during outbound travel. Drones employ "wall following" when encountering obstacles, adhering to their contours. When obstacle-free, they continue in their preferred direction. Inbound travel is initiated when a drone's battery level reaches around 60%. To return to the base station, drones use a combination of coarse odometry and an observable gradient leading to the base station, determined by received signal strength intensity (RSSI) from a radio beacon[7].
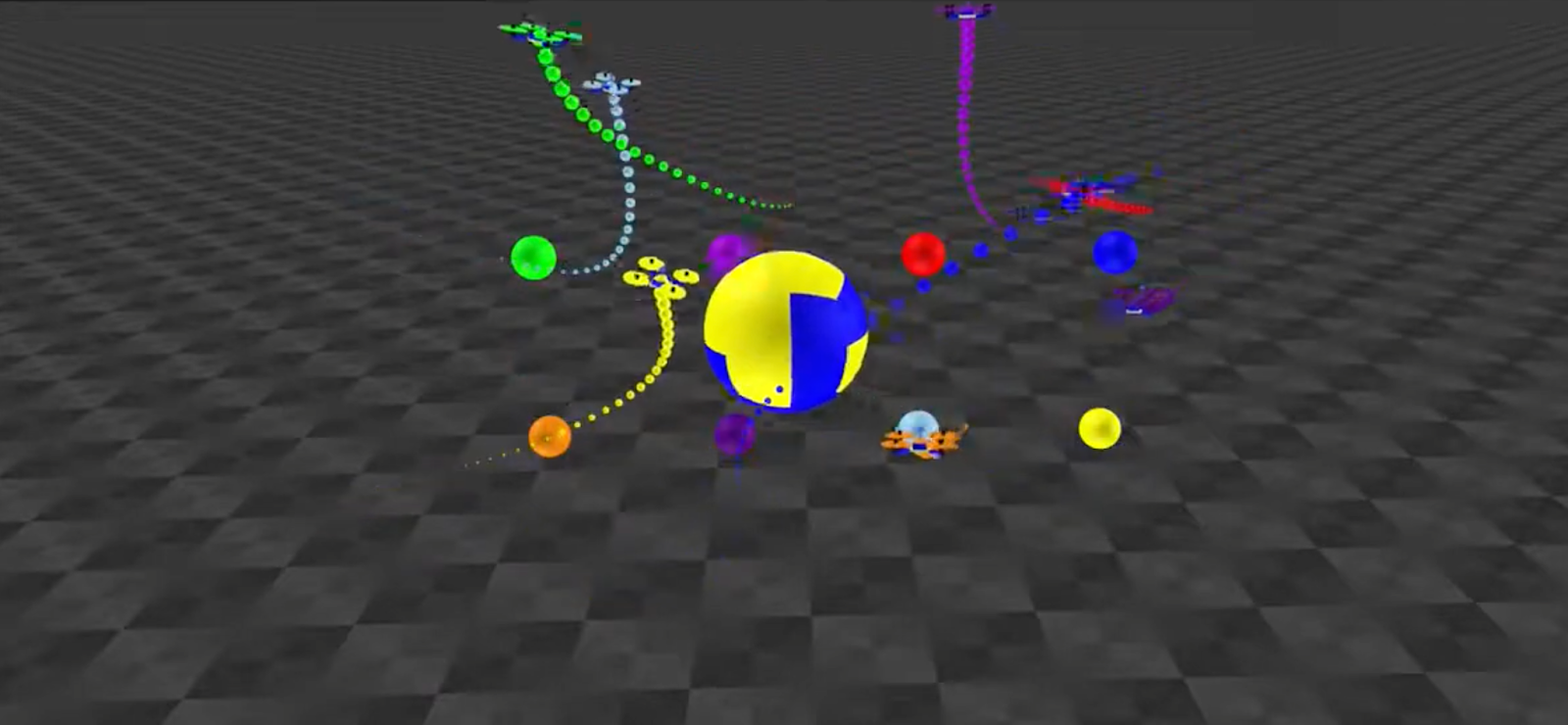

Figure 5 &6: Observe the Swarm Gradient Bug Algorithm in action, revealing the intricate interplay of dynamic and geometric formations within a simulated environment.
To address the risk of drones getting stuck in loops, odometry is utilized during both outbound and inbound travel to detect short-term loops. Onboard wireless inter-drone communication is employed for collision avoidance and communication of desired directions. The inter-drone RSSI is used for intra-swarm collision avoidance, and drones adjust their preferences when detecting other drones in the direction of their preferred heading, enhancing exploration during outbound flight.
Team Background and experience
- 2x Founder & Entrepreneur. Designer and software engineer, specializing in machine learning, computer vision, and neural networks. Resume
- Chiranjeewee Prasad Koirala, Github
- AI researcher with a strong background in machine learning, natural language processing, and deep neural networks.
- software engineer with a knack for designing and implementing robust and scalable solutions. Experienced in the full software development lifecycle, from concept to deployment.
- Blockchain Architect Proficient in various programming languages and frameworks, with a focus on creating efficient and user-friendly applications
- Yao (Bella) Chen, LinkedIn
- Software Engineer, Experienced in AI and infrastructure at all stages of product life-cycle.
Our team is growing rapidly without external funding yet. Despite not offering payment, hundreds of Engineers and Researchers, including master's and college students, are eager to join us, with some considering taking a gap year to work with us. In the first week of posting a non-paid job opportunity, over 400 engineers applied to be part of our mission. This substantial voluntary interest underscores the appeal and importance of our shared vision, drawing in talented individuals to contribute to our ambitious projects.
Budget
N0 | Description | Cost |
01 | Quadcopter Frames: $70 per frame | $700 |
02 | Flight Controller: $50 per controller | $500 |
03 | Motors and Propellers (Set of 4): $30 per set | $300 |
04 | Battery Packs: $30 per pack | $300 |
05 | Electronic Speed Controllers (ESC): $20 per ESC | $200 |
06 | Onboard Microcontroller (e.g., Raspberry Pi or Arduino): $60 per unit | $600 |
07 | Sensors (e.g., GPS, Gyroscope, Accelerometer): $30 per sensor | $300 |
08 | Communication Modules (e.g., Wi-Fi or Bluetooth): $30 per module | $300 |
09 | Chassis and Body Materials: $20 per drone | $200 |
10 | Miscellaneous Components (wires, connectors, etc.): $30 per drone | $300 |
11 | Lab Access Rent (4 months) per month $2,500 | 10,000 |
12 | Team Snacks | $1000 |
13 | Transportation | $2000 |
14 | Miscellaneous | $4000 |
TOTAL BUDGET | $20,700 |
Conclusion
In conclusion, blockchain technology offers immense potential to help advance swarm robotics from academic research toward real-world deployment at scale. Blockchain’s innate security, transparency and ability to enable trusted coordination could help overcome key roadblocks in widespread industry adoption of swarm systems comprised of numerous decentralized autonomous agents.
Specifically, blockchain shows promise to deliver critical identity verification, access controls and data security to establish trust in robot swarms managing sensitive information across uncertain environments. Enabling blockchain-based consensus through token voting also provides efficient distributed decision-making capabilities to synchronize actions across vast swarms. Additionally, configuring hierarchal chains of ledger subsets could facilitate blended behaviors between specialized robot subgroups operating in rapidly changing conditions.
Overall, thoughtfully incorporating blockchain principles directly into swarm operation appears uniquely suited to handle the complexity, distribution and scale critical for next-generation collective robot intelligence. Taking this step can elevate swarms beyond narrow constrained functionality toward broadly multipurpose, resilient and adaptive systems ready to take on real-world commercial and public service demands. The time is ripe to fund exploration of blockchain swarm architectures and propel this immensely promising technology frontier from theory into practice.Thats why we are building Drooid
References
Queralta, J. P., et al. (2020). Collaborative multi-drone search and rescue: Planning, coordination, perception, and active vision. IEEE Access, 8, 191617-191643.
Reid, C. R., Sumpter, D. J. T., & Beekman, M. (2011). Optimisation in a natural system: Argentine ants solve the Towers of Hanoi. Journal of Experimental Biology, 214, 50–58.
Menzel, R., Fuchs, J., Kirbach, A., Lehmann, K., & Greggers, U. (2012). Navigation and communication in honey bees. In Honeybee Neurobiology and Behavior (pp. 103–116). Springer.
Mondada, F., Gambardella, L. M., Floreano, D., Nolfi, S., & Deneubourg, J. (2005). The cooperation of swarm-bots: Physical interactions in collective robotics. IEEE Robotics and Automation Magazine, 12, 21–28.
Petersen, K. H., Nagpal, R., & Werfel, J. K. (2011). Termes: An autonomous robotic system for three-dimensional collective construction. In Robotics: Science and Systems VII.
Alonso-Mora, J., Siegwart, R., & Beardsley, P. (2014). Human-robot swarm interaction for entertainment: From animation display to gesture based control. In Proceedings of the 2014 ACM/IEEE International Conference on Human-robot Interaction (pp. 98-98). ACM.
Aragues, R., Cortes, J., & Sagues, C. (2012). Distributed consensus on robot networks for dynamically merging feature-based maps. IEEE Transactions on Robotics, 28(4), 840-854.
Bayındır, L. (2015). A review of swarm robotics tasks. Neurocomputing.
Bentes, C., & Saotome, O. (2012, October). Dynamic swarm formation with potential fields and A* path planning in 3D environment. In 2012 Brazilian Robotics Symposium and Latin American Robotics Symposium (pp. 74-78). IEEE.
Bonabeau, E., Dorigo, M., & Theraulaz, G. (1999). Swarm intelligence: From natural to artificial systems.
Brambilla, M., Ferrante, E., Birattari, M., & Dorigo, M. (2013). Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 7(1), 1-41.
Brito, J. & Castillo, A. (2013). Bitcoin: A primer for policymakers. Mercatus Center: George Mason University, 29(4), 3-12.
Cekmez, U., Ozsiginan, M., & Sahingoz, O.K. (2014). A UAV path planning with parallel ACO algorithm on CUDA platform. In 2014 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 347-354). IEEE.